
 水下机器人,也称无人遥控潜水器,是一种工作于水下的极限作业机器人。以下是关于水下机器人的详细介绍:
水下机器人,也称无人遥控潜水器,是一种工作于水下的极限作业机器人。以下是关于水下机器人的详细介绍:
根据控制和导航方式的不同,水下机器人主要分为有缆遥控潜水器和无缆自治水下机器人两大类。
有缆遥控潜水器:通过电缆与母船相连,由母船上的操作人员控制。这种机器人可以在操作人员的实时监控和指令下,进行各种水下作业。有缆遥控潜水器又分为水中自航式、拖航式和能在海底结构物上爬行式三种。
无缆自治水下机器人:则依靠自带的能源和控制系统在水下自主导航和执行任务。它们可以根据预设的程序或自主决策能力,完成各种水下任务,而无需人为干预。
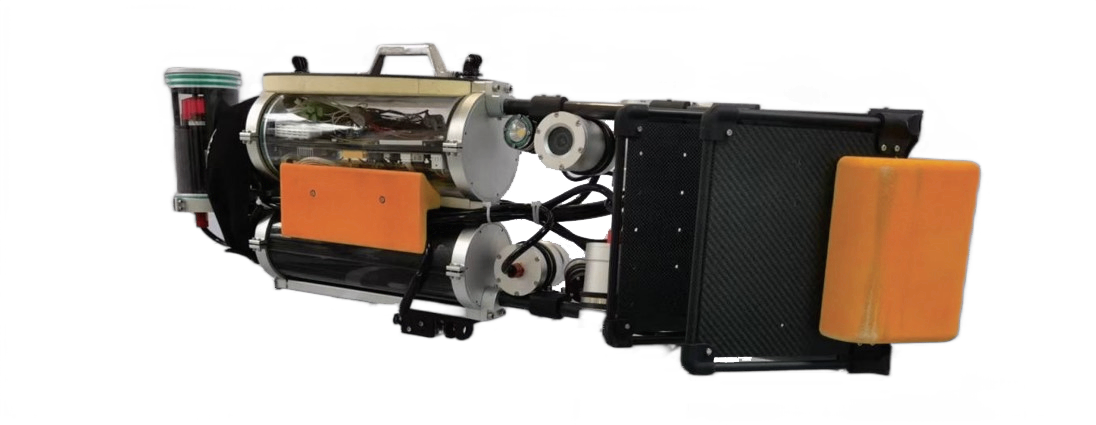
动力系统:水下机器人的动力系统主要分为有线控制和自主控制两种。有线控制通过电缆连接机器人和操作员站点,适用于简单、精确的水下作业,但受限于电缆长度。自主控制则允许机器人在没有人为干预的情况下自主运行,根据预设程序执行任务,具有更高的灵活性和作业深度,但需要先进的控制和传感器系统支持。
推进机制:多数水下机器人采用螺旋桨产生推力,结合可操控的舵面实现机动控制。此外,还有一些特殊的水下机器人,如采用仿生学设计的机器人,可能使用鱼鳍等生物形态结构进行推进。
传感器与控制系统:水下机器人配备多种传感器,如声呐、激光雷达、水下相机、水温、水压、水流、水质探测等,用于实时获取水下环境信息。控制系统是水下机器人的“大脑”,通过操纵动力系统和传感系统,实现机器人的各种操作控制。
材料与结构:机身和关键部件采用钛合金、铝合金等耐腐蚀材料,以应对深海环境的极端条件。同时,采用分级结构、随机结构等设计,减少机身结构泄漏的概率,提高机器人的稳定性和可靠性。
水下机器人在多个领域发挥着重要作用,包括但不限于:
海洋科研:水下机器人能够深入海洋进行科考、水质监测、地貌测绘等任务,为海洋科学研究提供更丰富的数据支持。
海洋工程:在水下石油开发、海底管道检测、海洋牧场建设等海洋工程领域,水下机器人能够高效地完成各种作业任务。
安全搜救:水下机器人能够在水下环境中执行搜索和救援工作,如寻找失踪人员、打捞沉船等。
环境保护:可用于海洋垃圾清理、生态修复等,助力实现海洋生态的可持续发展。
灾难救援:能在地震、洪水等灾害后的水下环境中执行搜索救援任务。
海底采矿:助力深海矿产资源的开发。
智能化与自主化程度提高:借助人工智能、大数据处理等先进技术,水下机器人将具备更强的自主决策能力、环境适应能力和任务执行能力。
跨学科技术深度融合:未来水下机器人将与5G/6G通信技术、物联网、先进材料等跨学科技术深度融合,实现远程实时控制、提高机器人的稳定性和耐用性等。
新兴领域不断涌现:随着技术的成熟和成本的降低,水下机器人将进入更多新兴领域,如海洋牧场监测、投放饲料等。
全球市场持续扩大:据市场研究机构统计与预测,全球水下机器人市场正经历迅猛增长。
